\(
\DeclareMathOperator*{\oiint}{{\normalsize{\subset\!\supset}}
\llap{\iint}} \)The Klein
Bottle
as the Configuration Space of a Mechanism
We posit the existence of a mechanism with a Klein bottle as its configuration space
(c-space).
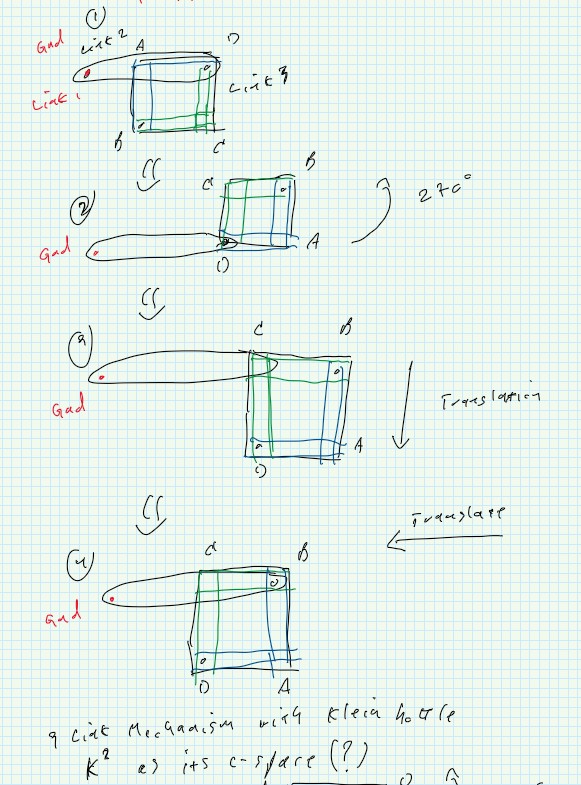
Consider the following a sort-of -llink, 2D robot arm mechanism that
would have a Klein bottle as its c-space, Link 1 should be ground. Link
2 should just be an extruded long and slender ellipse that is a crank.
Link 3 should be a square with corners labeled labeled A (upper left),
B (lower left), C (lower right), and D (upper right). Link 3 should
start rotating around a pin joint through point D for
270\(^{\circ}\) CCW, so that we now have the configuration C (upper
left), D
(lower left), A (lower right), and B (upper right). Then the pin joint
of Link 3 should be able to slide on up to the top right corner C, then
to the right to B, so the B is on the top in the upper right corner of
the square with configuration C (upper left), D (lower left), A (lower
right), and B (upper right) still and B as the new rotation point. It
is important that the pin joint at D cannot slide until the mechanism
has rotated 270\(^{\circ}\) CCW and that the pin joint at B similarly cannot
rotate
as it is sliding, for else the mechanism would have mobility M = 3 and
could not have a 2D Klein bottle as its c-space (it would instead have
to have some 3-manifold as its c-space). Any further motion of Link 3
repeats this pattern (B rotates 270\(^{\circ}\) CCW, then slides to A
and to D, D rotates 270\(^{\circ}\) CCW, then slides to C and to B,
etc.). This should force the motion for Link 3 to recreate
the red non-orientable loop with the arrows in the below graphic.
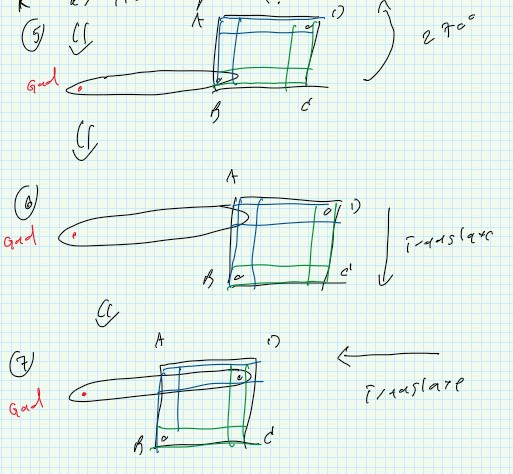
3-Link Mechanism with a Klein Bottle for its C-Space
(Note that motions (5), (6),
and (7) "complete" the c-space to the Klein bottle's double-cover, the
torus).
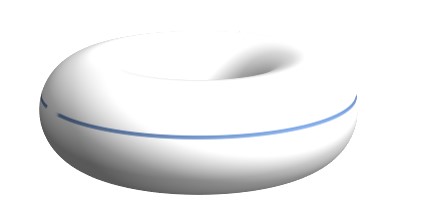
The torus \(T^2\)
\(\downarrow\)
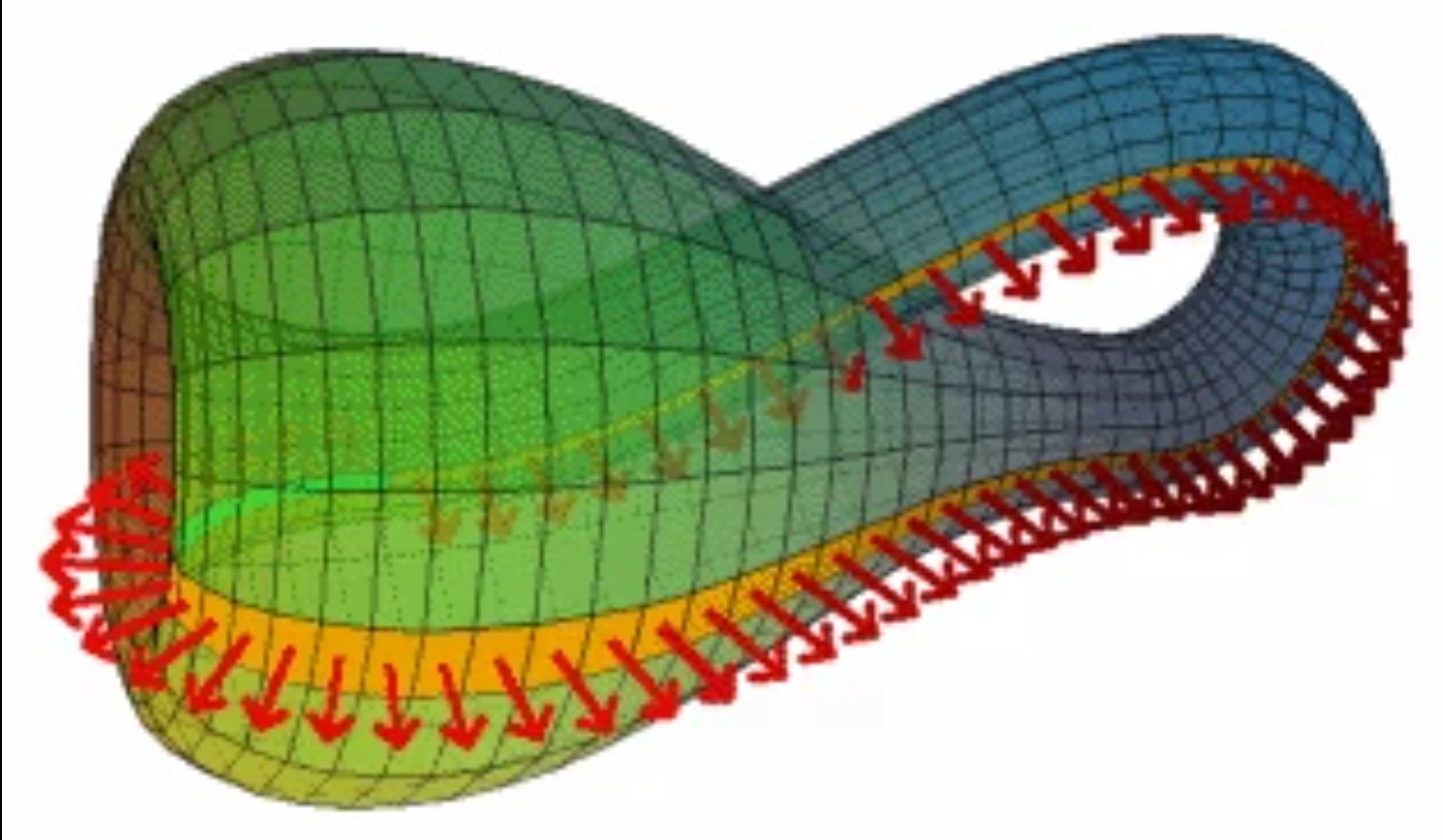
The
Klein bottle \(K^2\)
(The orientations-reversing loop in red with
arrowsin the Klein bottle becomes "doubled" to the blue loop in the Klein bottle's
orientation double-cover torus above.)
We shall identify \(K^2\) with \([0,2\pi]^2\), with units of
radians, via the standard coordinate patch \(\phi: [0, 2\pi]^2 \to
T^2\) given by TBD and therefore endow it with the
units of radians, although it is technically unitless. The Riemannian
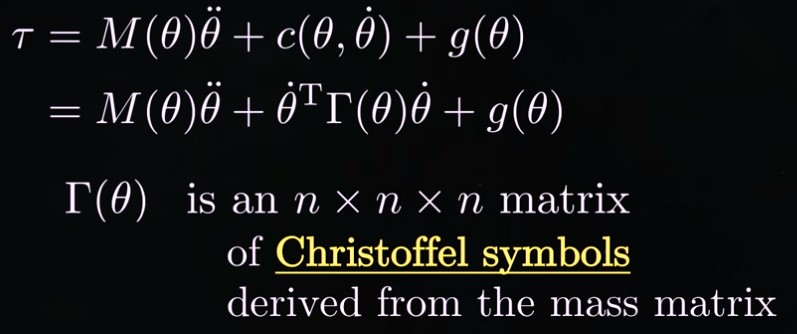
metric (r-metric) \(g(\theta_1, \theta_2)\) (written as \(M(\theta)\)
in the
following graphic from https://youtu.be/BjD-pL819LA?si=q8_It-jJFEq0AmEu&t=212;
\(g(\theta)\) in the following graphic is the gravity term) may be read
off the equation of motion (EoM):
The
Riemannian metric in the standard coordinate patch for this robot arm
is given by \[\begin{bmatrix}\text{TBD}\end{bmatrix}\]
Note that the entries in the Riemannian metric
have dimensions of \(\left[\text{Length}^2 \cdot
\text{Mass}\right]\). (It should be noted that there are
dimensions/units used for the
describing the robot arm and hence, perhaps bizarrely, for describing
the
Riemannian metric. Points in the
manifold and tangent vectors to the manifold are part of the intrinsic
topology of the underlying smooth manifold of the c-space and have only
dimensions of [Angular Measure], while inner products/norms of tangent
vectors and
lengths of curves/distances between points in the manifold depend on
Riemannian metric, which is extrinsic to the topology of the underlying
manifold; inner products of tangent vectors have dimensions of
\(\displaystyle\left[\text{Angular Measure}^2\cdot\text{Length}^2 \cdot
\text{Mass}\right]\) while norms of tangent vectors and lengths of
curves/distances between points have units of
\(\displaystyle\left[\text{Angular Measure}\cdot\text{Length} \cdot
\text{Mass}^{\frac{1}{2}}\right]\).)
By varying the parameters of each robot arm and the distance between
ground on each robot arm, we should be able to synthesize an r-metric
with constant curvature 0. (Note that by The
Theorem Egregium, the integral of the curvature form over the whole
c-space must be \(\displaystyle \oiint\limits_{K^2}\ \kappa\ dS = \chi(K) = 0\).) This c-space would then necessarily have
the flat Euclidean plane \(\mathbb{R}^2\) as its universal cover.