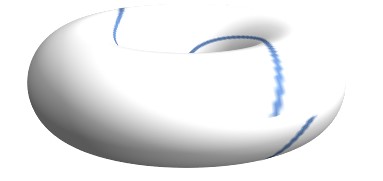
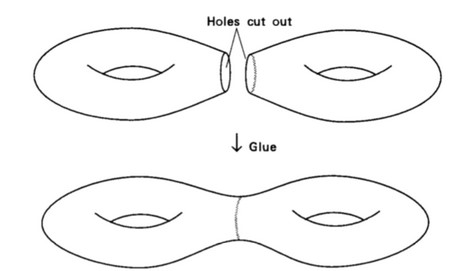
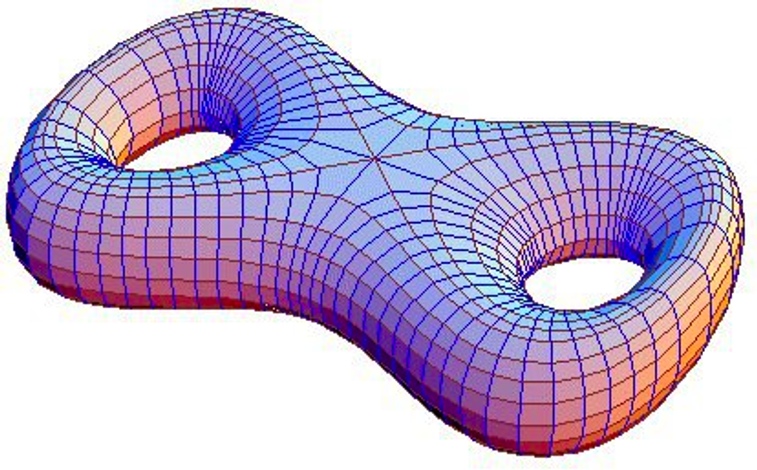
The configuration space (c-space) of this mechanism is the
"connect sum" (as outlined on this website [Java required to view webpages
properly]) of the c-spaces of 2 double-pendulum robot arms, which is a genus-2
torus.
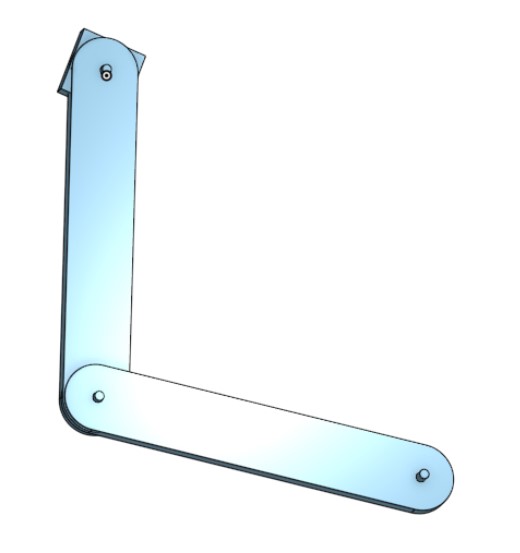
Two double-pendulum robot arms
The robot arms' c-spaces
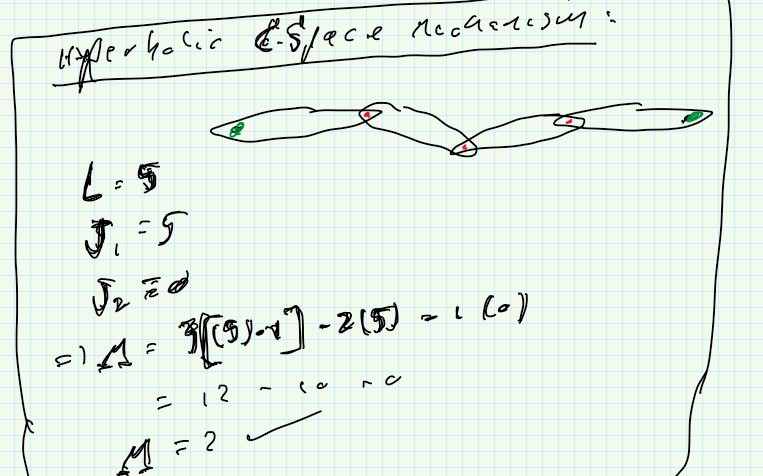
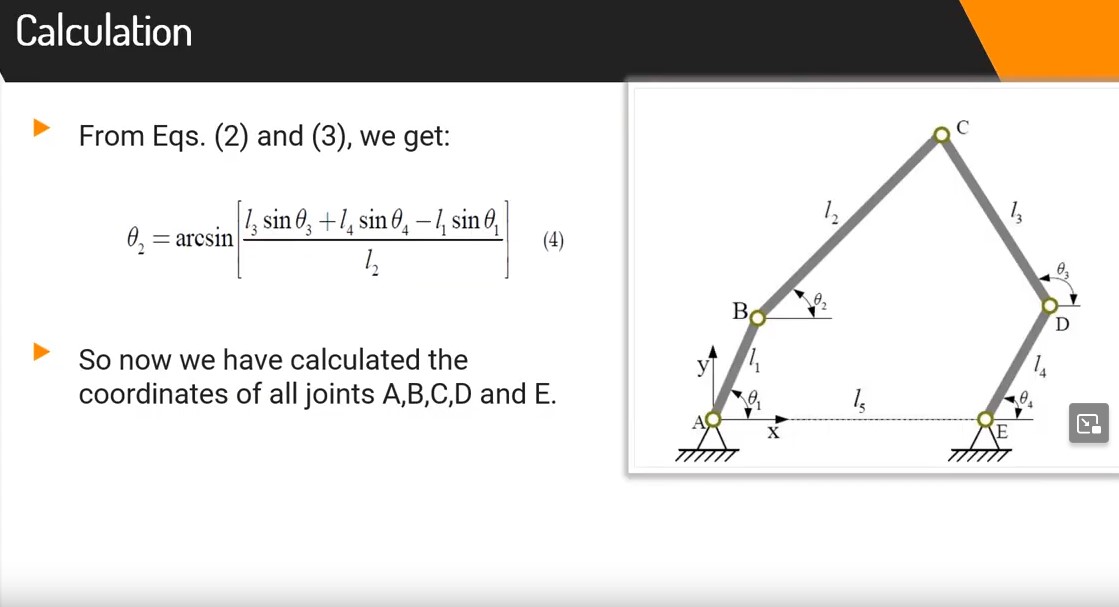
Joining the 2 robot arms with a full pin joint to create a 5-bar
mechanism
The 2D c-space of a 5-bar mechanism that is the "connect sum" of 2
double-pendulum robot
arms' c-spaces
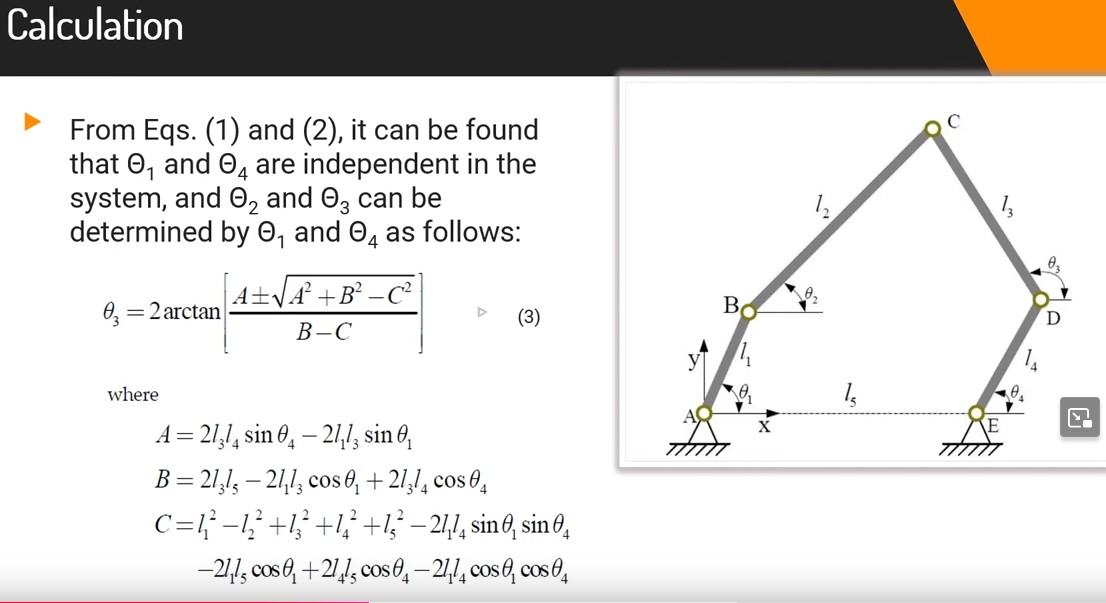
For definiteness, for this particular mechanism, the
values of the parameters are \(m_1 = m_4 = 0.1\) kg, \(m_2 = m_3 = 0.5\) kg, \(l_1 = l_4 = 0.04\) m,
\(l_2 = l_3 = 0.30\) m,
\(l_5 = 0.10\) m (ground), and \(I_{zz,i} = 0.001\)
\(\text{kg}\cdot\text{m}^2\) in SI, using PLC for the material.
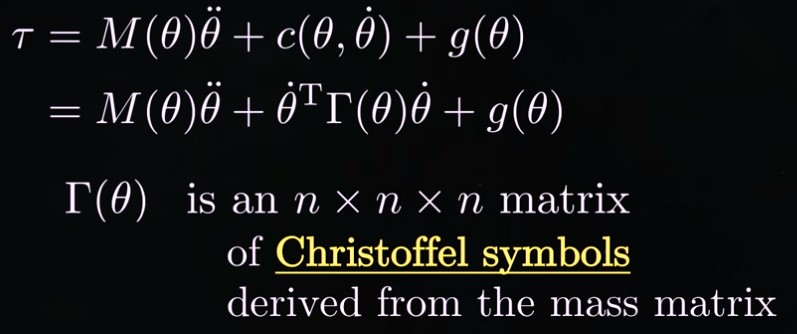
The Riemannian
metric (r-metric), \(g(\theta_1, \theta_2)\) in one coordinate patch
(c-patch), \(g(\theta_4, \theta_3)\) in the other c-patch, (written as
\(M(\vec{\theta})\)
in the
following graphic from https://youtu.be/BjD-pL819LA?si=q8_It-jJFEq0AmEu&t=212;
\(g(\vec{\theta})\) in the following graphic is the gravity term) may
be read
off the equation of motion (EoM):
The
Riemannian metric in a coordinate patch using \(\theta_1\) and
\(\theta_4\) (\(\theta_2\) and \(\theta_3\) are computed by the above
formulas) for this mechanism
is given by \[g(\theta_1, \theta_4) = \begin{bmatrix}
\frac{-3\cos(2\theta_3 -
2\theta_2) + \cos(2\theta_1 - 2\theta_3) - 2.201\cos(2\theta_2 -
2\theta_3) + 4.201}{\sin(\theta_2 - \theta_3)} &
\frac{-2\sin(\theta_1 - \theta_2)\sin(\theta_2 - 2\theta_3) +
2.0\sin(\theta_3 - \theta_4)\sin(\theta_1 - 2\theta_2 +
\theta_3)}{\sin(\theta_2 - \theta_3)} \\
\frac{-2\sin(\theta_1 - \theta_2)\sin(\theta_2 - 2\theta_3) +
2.0\sin(\theta_3 - \theta_4)\sin(\theta_1 - 2\theta_2 +
\theta_3)}{\sin(\theta_2 -
\theta_3)}
&
\frac{-2.201\cos(2\theta_2 - 2\theta_3) + \cos(2\theta_2 - 2\theta_4) -
3\cos(2\theta_3 - 2\theta_4) + 4.201}{\sin(\theta_2 - \theta_3)}
\end{bmatrix}\]
Note that the entries in the Riemannian metric
have dimensions of \(\left[\text{Length}^2 \cdot
\text{Mass}\right]\). (It should be noted that there are
dimensions/units used for the
describing the robot arm and hence, perhaps bizarrely, for describing
the
Riemannian metric. Points in the
manifold and tangent vectors to the manifold are part of the intrinsic
topology of the underlying smooth manifold of the c-space and have only
dimensions of [Angular Measure], while inner products/norms of tangent
vectors and
lengths of curves/distances between points in the manifold depend on
Riemannian metric, which is extrinsic to the topology of the underlying
manifold; inner products of tangent vectors have dimensions of
\(\displaystyle\left[\text{Angular Measure}^2\cdot\text{Length}^2 \cdot
\text{Mass}\right]\) while norms of tangent vectors and lengths of
curves/distances between points have units of
\(\displaystyle\left[\text{Angular Measure}\cdot\text{Length} \cdot
\text{Mass}^{\frac{1}{2}}\right]\).)
Note that by The
Theorem Egregium [1], the integral of the curvature form over the whole
c-space must be \(\displaystyle \oiint\limits_{M}\ \kappa\ dS = 2\pi\chi(M) = 2\pi(-2) =
-4\pi\).