\(\DeclareMathOperator*{\oiint}{{\subset\!\supset} \llap{\iint}}\)
\(\DeclareMathOperator*{\oiiint}{{\Large{\subset\!\supset}}
\llap{\iiint}}\) A
Robot Arm's Torus Riemannian Configuration Space
Consider a double-pendulum robot arm with c-space a 2D torus
\(T^2\).
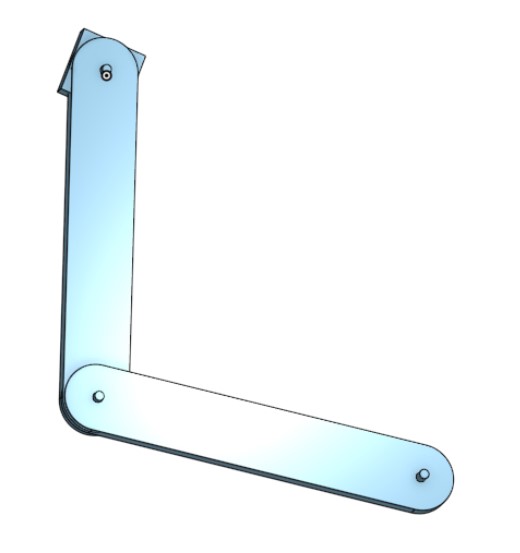
My CAD model of a 2D pendulum (click for OnShape link)
My 3D print of my 2D CAD model
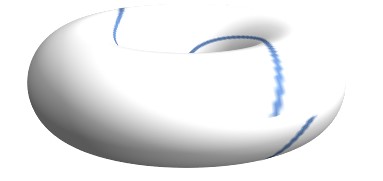
The 2D c-space of my double pendulum CAD model with a (not closed)
geodesic traced out on it
A video of Prof. Jim Yorke
displaying chaotic properties of the double pendulum
at a Mardem lecture at UWM.
The quote that got me into
engineering:
"The more chaotic a dynamical system is, the more controllable it is."
- Dr.
John Hubbard (Cornell University), Marden Lecture in Mathematics, UWM (2008)
(I haven't actually found the quote to be true, but it is the quote
that got me into engineering.)
A video of Prof. Steve
Brunton displaying control engineering of the chaos on the double
pendulum.
A video of a Boston Dynamics
robot dancing.
(When on can "make the system dance" [usually metaphorically, but
literally in this case], one generally has achieved the desired level
of control
of the system.)
We shall identify \(T^2\) with \([0,2\pi]^2\), with units of
radians, via the standard coordinate patch \(\phi: [0, 2\pi]^2 \to
T^2\) given by
\(\phi(\theta_1, \theta_2) = ((\cos(\theta_1), \sin(\theta_1)),
(\cos(\theta_2), \sin(\theta_1)))\) and therefore endow it with the
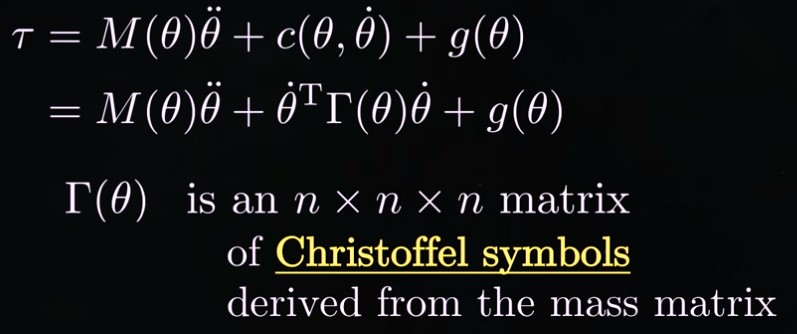
units of radians, although it is technically unitless. The Riemannian
metric (r-metric) \(g(\theta_1, \theta_2)\) (written as \(M(\theta)\)
in the
following graphic from https://youtu.be/BjD-pL819LA?si=q8_It-jJFEq0AmEu&t=212;
\(g(\theta)\) in the following graphic is the gravity term) may be read
off the equation of motion (EoM):
The
Riemannian metric in the standard coordinate patch for this robot arm
is given by
Note that the entries in the Riemannian metric
have dimensions of \(\left[\text{Length}^2 \cdot
\text{Mass}\right]\). (It should be noted that there are
dimensions/units used for the
describing the robot arm and hence, perhaps bizarrely, for describing
the
Riemannian metric. Points in the
manifold and tangent vectors to the manifold are part of the intrinsic
topology of the underlying smooth manifold of the c-space and have only
dimensions of [Angular Measure], while inner products/norms of tangent
vectors and
lengths of curves/distances between points in the manifold depend on
Riemannian metric, which is extrinsic to the topology of the underlying
manifold; inner products of tangent vectors have dimensions of
\(\displaystyle\left[\text{Angular Measure}^2\cdot\text{Length}^2 \cdot
\text{Mass}\right]\) while norms of tangent vectors and lengths of
curves/distances between points have units of
\(\displaystyle\left[\text{Angular Measure}\cdot\text{Length} \cdot
\text{Mass}^{\frac{1}{2}}\right]\). This kind of r-metric is known as
the "mass matrix'" and morally has dimensions of mass. The way that
things work out here, there are \(I_{zz}\) terms, and we can't just
move the lengths to the \(\theta\) factors. But, morally, the mass
matrix has dimensions of mass.)
This link, curvature.m,
computes the sectional
curvature correctly in
MATLAB, and it is not identically 0. There is a check that
\(\displaystyle \oiint_{T^2}\ K\ dS\ = 4\pi \chi(T^2) = 0\). This link,
Curvature03.nb (shamelessly pirated from [1]),
validates the
computation of the sectional curvature of my Riemannian manifold in
Mathematica (although it heavily uses the fact we are in dimension 2;
I'll need to work on that). This is the scalar curvature as computed in
MATLAB:
This is the scalar curvature as computed in
Mathematica:
This link, TorusVolumeForm01.nb,
shows that the volume of the torus is
\(\displaystyle\oiint_{[T^2]}\ \eta_{\text{Vol}_g} = 0.253\
\text{rad}^2\cdot\text{m}^2\cdot\text{kg}\) in the inertial r-metric.